 The Society of Robotics and Automation is a society for VJTI students. As the name suggests, we deal with Robotics, Machine Vision and Automation
The Society of Robotics and Automation is a society for VJTI students. As the name suggests, we deal with Robotics, Machine Vision and Automation
Guide to using singularity to run ROS Melodic
Published on 11 Dec 2020
A guide to install singularity and use ROS melodic and all GUI components with it
A Noobs guide by a Noob to install ros on singularity
- In here only ros-melodic is shown , but it could be done the same way for noetic or ros2 by editing
osrf/ros:<tag_name>tag names - As of Dec 10th,2020 Singularity is not supported on Windows
- These guidlines are tested for Ubuntu 18.04 , 20.10 (Groovy G)
Installing GO
- You coud just install go from the official guide but since you are here, you need it from here :smirk:
Install the dependencies using apt
sudo apt-get update && sudo apt-get install -y build-essential libseccomp-dev pkg-config squashfs-tools cryptsetup
- Visit Go downloads
- Copy the latest stable release link for linux , until today 15.6 is the latest one
wget https://golang.org/dl/go1.15.6.linux-amd64.tar.gz - The /usr/local hierarchy is for use by the system administrator when installing software locally.
- Locally installed software must be placed within /usr/local rather than /usr unless it is being installed to replace or upgrade software in /usr. Ref
- Thus extract it in /usr/local using tar
sudo tar -C /usr/local -xzf go1.15.6.linux-amd64.tar.gz
- Now we need to set the environment variables for go
- I set them directly in .bashrc but you can do it in alternative
echo 'export PATH=$PATH:/usr/local/go/bin' >> ~/.bashrc
mkdir ~/go_projects
echo 'export GOPATH="$HOME/go_projects"' >> ~/.bashrc
echo 'export GOBIN="$GOPATH/bin"' >> ~/.bashrc
- Now resource
source ./bashrc - Now check the installation
go version go env - Output would be
go version go1.15.6 linux/amd64andGOBIN="/home/satacker/go_projects/bin" GOCACHE="/home/satacker/.cache/go-build" GOENV="/home/satacker/.config/go/env" ...{and so on}
Installing Singularity
- It is optional to install golangci-lint as per the singularity installation
curl -sfL https://install.goreleaser.com/github.com/golangci/golangci-lint.sh | sh -s -- -b $(go env GOPATH)/bin v1.21.0
- Now installing Singularity
mkdir -p $(go env GOPATH)/src/github.com/sylabs
cd $(go env GOPATH)/src/github.com/sylabs
git clone https://github.com/sylabs/singularity.git
cd singularity
- As of today v3.6.4 is a stable one
- Now inside
singularitygit checkout v3.6.4 ./mconfig cd ./builddir make sudo make install - To verify the installation
singularity version
Installing ros melodic from osrf image
cd ~ && sudo singularity build --sandbox melodic/ docker://osrf/ros:melodic-desktop-full
- Now the container image is ready
- To execute scripts in the container
sudo singularity shell --writable melodic/ - This will open a Shell in Singurity image with the current directory mounted by default
- Try
apt update && apt upgrade
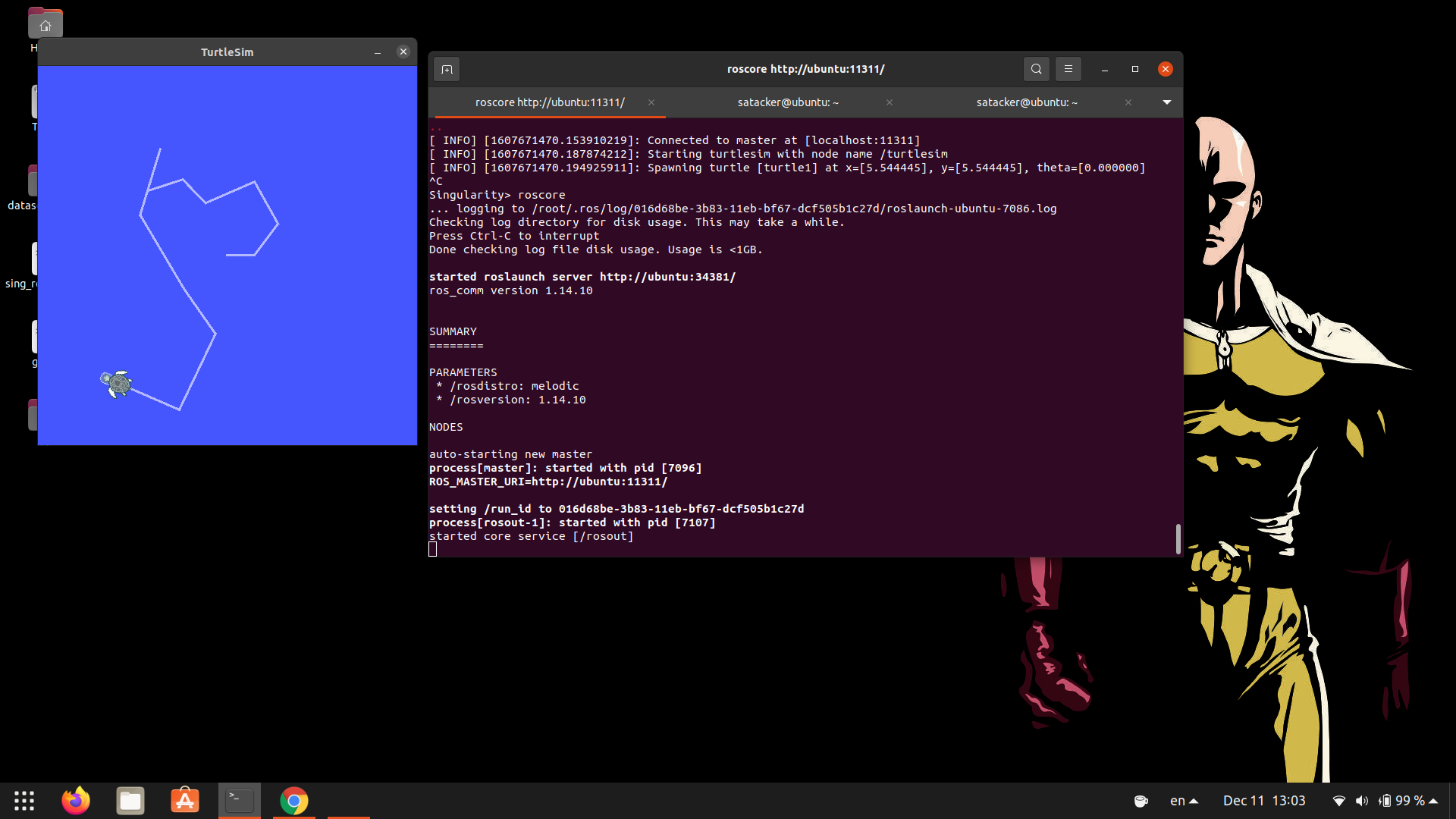
Running roscore
satacker@ubuntu:~$ sudo singularity shell -w melodic/
[sudo] password for satacker:
Singularity> source /opt/ros/melodic/setup.bash
Singularity> roscore
... logging to /root/.ros/log/b03e5adc-3b89-11eb-b60b-dcf505b1c27d/roslaunch-ubuntu-13488.log
Checking log directory for disk usage. This may take a while.
Press Ctrl-C to interrupt
Done checking log file disk usage. Usage is <1GB.
started roslaunch server http://ubuntu:40581/
ros_comm version 1.14.10
SUMMARY
========
PARAMETERS
* /rosdistro: melodic
* /rosversion: 1.14.10
NODES
auto-starting new master
process[master]: started with pid [13498]
ROS_MASTER_URI=http://ubuntu:11311/
setting /run_id to b03e5adc-3b89-11eb-b60b-dcf505b1c27d
process[rosout-1]: started with pid [13509]
started core service [/rosout]
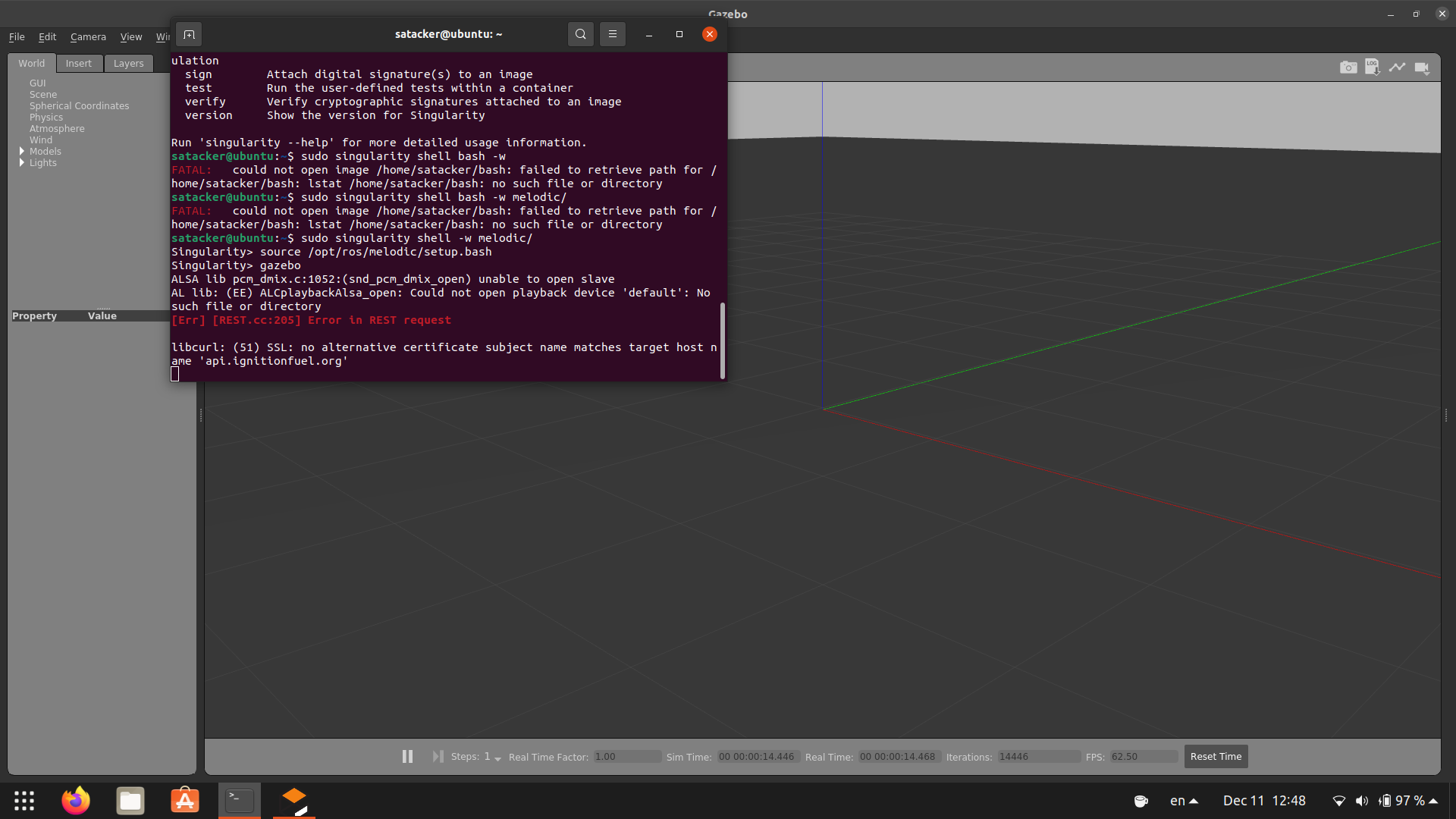
Running Gazebo
- If you get any errors please see Known Issues
Host to Container
- When Singularity ‘swaps’ the host operating system for the one inside your container, the host file systems becomes inaccessible. But you may want to read and write files on the host system from within the container. To enable this functionality, Singularity will bind directories back in via two primary methods: system-defined bind points and conditional user-defined bind points.
- Before
satacker@ubuntu:~$ sudo singularity shell -w melodic/
Singularity> cd /home/
Singularity> ls
Singularity>
- After
satacker@ubuntu:~$ sudo singularity shell -B /home/satacker/:/home/ -w melodic/
Singularity> cd /home/
Singularity> ls
Desktop Downloads Pictures Templates anaconda3 melodic wget-log
Documents Music Public Videos go_projects snap
Singularity>
- In the above command
-Bis the option selected and/home/satacker/on the host is now binded with/home/on the container - Beware Mount options (opts) may be specified as ro (read-only) or rw (read/write, which is the default)
Singularity> touch test.test
Singularity> ls
Desktop Downloads Pictures Templates anaconda3 melodic test.test
Documents Music Public Videos go_projects snap wget-log
Singularity>
satacker@ubuntu:~$ ls
anaconda3 Documents go_projects Music Public Templates Videos
Desktop Downloads melodic Pictures snap test.test wget-log
Multiple Instances of same image
satacker@ubuntu:~$ singularity instance start melodic/ instance_1
INFO: instance started successfully
satacker@ubuntu:~$ singularity instance start melodic/ instance_2
INFO: instance started successfully
Stopping Instances
satacker@ubuntu:~$ singularity instance list
INSTANCE NAME PID IP IMAGE
instance_1 6705 /home/satacker/melodic
instance_2 6994 /home/satacker/melodic
satacker@ubuntu:~$ singularity instance stop instance_1
INFO: Stopping instance_1 instance of /home/satacker/melodic (PID=6705)
satacker@ubuntu:~$ singularity instance stop instance_2
INFO: Stopping instance_2 instance of /home/satacker/melodic (PID=6994)
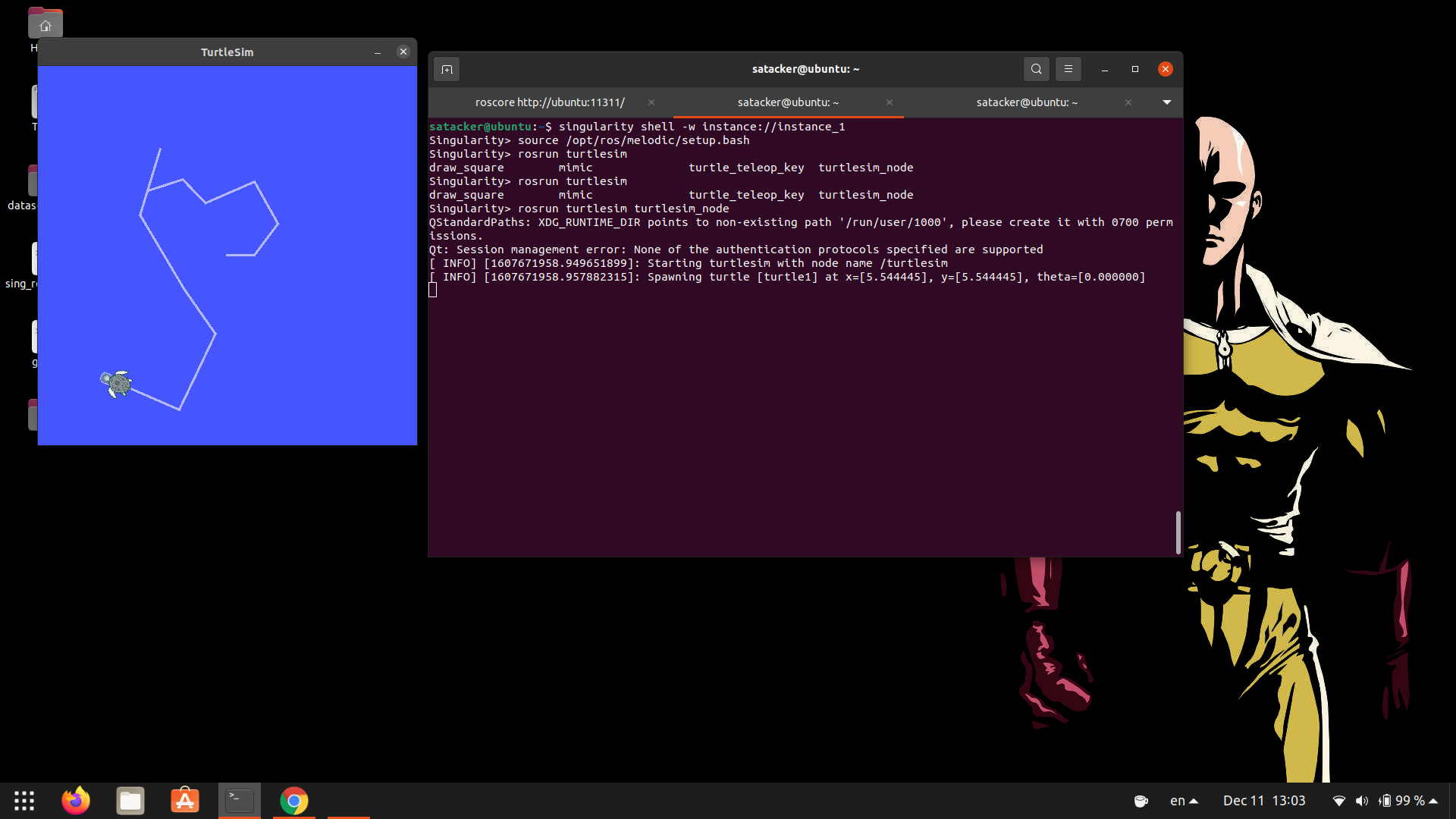
Running Turtlesim
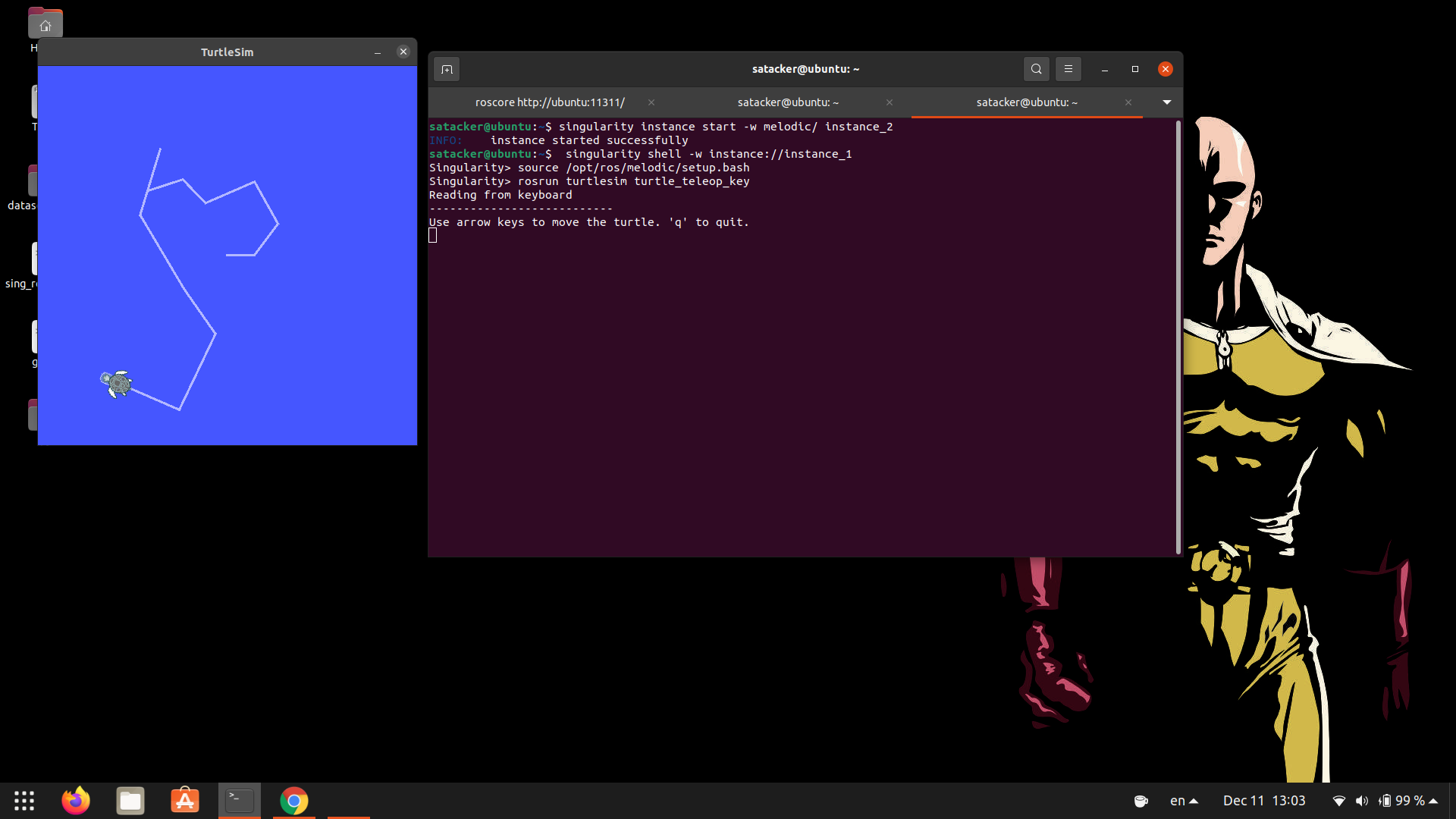
Using Terminator
Known issues
- While running the gui apps the windowing system may give
No protocol specifiedandxcb_connection_has_error() returned trueThe possible workaround (also the easiest) for this is to allow the anyone on the localhost to connect to your dislpay usingxhost +local:- ref libGL error: No matching fbConfigs or visuals found libGL error: failed to load driver: swrastThe possible workaround is to install nvidia or other graphic drivers ref and then a reboot- While running terminator
dbus.exceptions.DBusException: org.freedesktop.DBus.Error.Spawn.ExecFailed: /usr/bin/dbus-launch terminated abnormally without any error messageD-Bus is a software bus, inter-process communication, and remote procedure call mechanism that allows communication between multiple processes running concurrently on the same machine. simply useterminator -u